
一、 立项背景
客户方工作面设备的安装与拆撤主要利用回柱绞车进行拖动作业,由于绞车与被移动物体的距离较远,两点间情况不明,难以进行良好的沟通,不能够准确掌握紧绳、松绳等操作的时机,因此容易出现过流、断绳等故障,严重影响生产效率;同时伴有极大的安全隐患。
为了提高安全可靠性和工作效率,缩短操作和维修时间,需要研究设计一套无线遥控集中控制系统,提高绞车各作业点间的互动能力,主要研究内容如下:
将控制绞车的紧绳、松绳、馈电闭锁、电铃等信号逐一分散的控制方式改为无线遥控集中控制的方式;
研究开发以提高绞车急停、电铃信号和馈电闭锁控制的灵敏度;
设计简单、紧凑,使用快捷、灵活方便。
二、 项目实施方案
2.1 绞车无线遥控集中控制系统的整体框架结构
一套绞车遥控集中控制系统包含遥控系统和对讲系统。遥控系统包含遥控器、指令接收站,对讲系统包含语音通话模组。遥控器与指令接收站是配对使用,完成遥控和监视绞车的功能;通话模块只具备对讲功能,与遥控器和指令接收站所使用的通信频段不同,不会相互影响。
遥控器的主要功能有两个,一是把所需要的全部遥控指令通过无线的方式发送给接收站;二是可以实时显示绞车的工作电流,对绞车运行状态进行直观的监测。主遥控器与副遥控器的功能有区别,主遥控器能够实现绞车的紧绳、松绳、停车、急停(绞车的上级供电设备)、复位(主副相互复位)、电铃;副遥控器能够实现绞车的停车、急停(绞车的上级供电设备)、复位(主副相互复位)、电铃。
指令接收站的主要功能有两个,一是接收遥控器发送来的操作指令,并按指令给出操作绞车的开关量信号;二是监控测量绞车的运行工作电流参数。
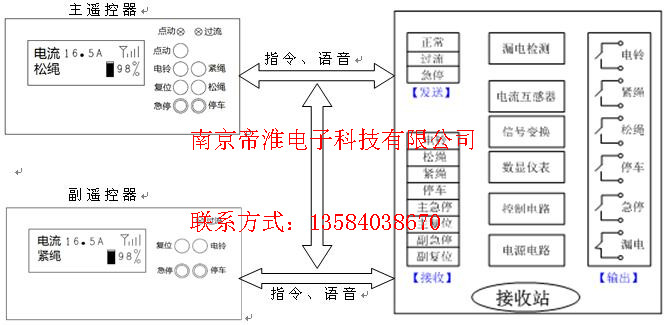
绞车无线遥控集中控制系统的框架结构如下图1所示。

图1 绞车遥控集中控制设备整体框架结构
2.2指令接收站的功能与特点
符合煤安的隔爆兼本安的规范要求。
与遥控器的通信频段不同于通话模块频段。
自动搜索配对的遥控器,并显示连接状态。一套遥控器(主副遥控器)只与配对的接收站进行通讯,操控唯一的绞车。
接收站“遥控功能”的开启与关闭是可转换。选择关闭后,接收器失效,进入手动状态。遥控功能关闭后,对讲功能保留。
根据收到的遥控器指令,给出相应指令的开关量信号。操作指令包括:“电铃”、“紧绳”、“松绳”、“停车”、“急停”;
接收站的默认指令为“停车”。
若无法与遥控器建立连接,则给出“停车”信号。
测量并显示绞车的工作电流值。并有“过流”、“正常”状态指示灯。
“紧绳”信号给出4—6秒后,判断绞车的工作电流值是否超限,如果超限则给出“停车”信号。
具备漏电自检功能。
接收器供电电源电缆接入口按不小于16平方的线来设计。
2.3遥控器的功能与特点
遥控器分为主遥控器和副遥控器,标准配置为一个主遥控器和二个副遥控器。主副遥控器具有以下功能和特点:
符合煤安的本安设计规范。
主遥控器能够实现绞车的紧绳、松绳、停车、急停(绞车的上级供电设备)、复位(主副相互复位)、电铃;副遥控器能够实现绞车的停车、急停(绞车的上级供电设备)、复位(主副相互复位)、电铃。
关于复位:当“主”(或“副”)遥控器按下“急停”时,只有“主”(或“副”)遥控器“复位”(即解除“急停”)后,再按“主”或“副”遥控器的其它按钮才起作用。
遥控器的按键:“急停”和“停止”键采用凸起式;其它按键采用凹式。
具备点动控制开关切换按钮及指示灯。
实时显示绞车当前的工作状态。
实时显示绞车的工作电流值。
主副遥控器具备对讲功能。
主副遥控器与接收站配套使用,避免相互干扰,对讲不影响遥控,遥控优先。
遥控器采用可充电电池供电,并采用低功耗设计;
采用标准直棒式天线,结构上设计成抽拉式;
壳体防尘、防水等级按IP65级设计;
防潮、防震设计符合相关规定进行试验。
