
船舶机械无线遥控器多机构正反转控制选择厂商南京帝淮非标工业遥控器设计
船舶机械无线遥控器多机构正反转控制选择厂商南京帝淮非标工业遥控器设计
无线工业遥控器研制厂商南京帝淮电子科技技术说明讲解
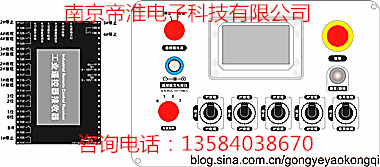
本机船舶机械无线遥控器产品型号DH-Z3X4BZ,具备一个四位置旋转选择开关,可选择4种工作状态,布局4个三位自锁保持模式扭子开关,其中1个为备用,常用的是1号2号3号,4号不常用。4种状态选择,包含0位、1位、2位、3位,0位时即为不对应任何控制,当旋转开关转到1位置时,此时对应的1号设备的配电箱通电,这时操作1号扭子开关才起作用,向前推动则执行1号设备的放缆、回到中间位置则为放缆停止、扭子开关拉倒下位则为收揽,再次回到中间零位则为收揽停止。1号2号3号对应的控制完全同理,实际是对应了3个放缆收揽设备,且每个设备均具备独立的电源控制,只有接通了每个设备的总电源的通路才可对应其进一步的动作进行控制。
船舶机械无线遥控器DH-Z3X4BZ为非标工业遥控器定做类型,每套包含1台发射器+1台接收器,选择旋转开关,每个选择位均各自对应1路开关量信号输出,选择旋转到位时则对应的控制回路接通,旋转离开选择位时则之前对应的输出控制回路断开,继续到新对应的控制回路接通。每个扭子开关即为拨杆各自均具备三个控制点位,每个点位各对应1路继电器输出,即为每个拨杆对应的输出是3路常开点继电器输出。且拨杆均为自复位模式,手推动时执行输出,手动松开则回到中间零位,可点动微调、寸动执行。本机另含遥控器系统的总启动和总停止,总启动对应1路主输出控制,总急停即为紧急情况下拍下后,即可切断主输出控制回路同时切断其他所有正在执行的控制回路,以确保动作执行的安全可靠性。
无线工业遥控器研制厂商南京帝淮电子科技技术说明讲解
本机船舶机械无线遥控器产品型号DH-Z3X4BZ,具备一个四位置旋转选择开关,可选择4种工作状态,布局4个三位自锁保持模式扭子开关,其中1个为备用,常用的是1号2号3号,4号不常用。4种状态选择,包含0位、1位、2位、3位,0位时即为不对应任何控制,当旋转开关转到1位置时,此时对应的1号设备的配电箱通电,这时操作1号扭子开关才起作用,向前推动则执行1号设备的放缆、回到中间位置则为放缆停止、扭子开关拉倒下位则为收揽,再次回到中间零位则为收揽停止。1号2号3号对应的控制完全同理,实际是对应了3个放缆收揽设备,且每个设备均具备独立的电源控制,只有接通了每个设备的总电源的通路才可对应其进一步的动作进行控制。
船舶机械无线遥控器DH-Z3X4BZ为非标工业遥控器定做类型,每套包含1台发射器+1台接收器,选择旋转开关,每个选择位均各自对应1路开关量信号输出,选择旋转到位时则对应的控制回路接通,旋转离开选择位时则之前对应的输出控制回路断开,继续到新对应的控制回路接通。每个扭子开关即为拨杆各自均具备三个控制点位,每个点位各对应1路继电器输出,即为每个拨杆对应的输出是3路常开点继电器输出。且拨杆均为自复位模式,手推动时执行输出,手动松开则回到中间零位,可点动微调、寸动执行。本机另含遥控器系统的总启动和总停止,总启动对应1路主输出控制,总急停即为紧急情况下拍下后,即可切断主输出控制回路同时切断其他所有正在执行的控制回路,以确保动作执行的安全可靠性。
