
1500米无人船无线遥控器技术说明厂商南京帝淮科技远程工业级遥控器定做
1500米无人船无线遥控器技术说明厂商南京帝淮科技远程工业级遥控器定做
非标工业遥控器研发定制厂商南京帝淮电子科技讲解
一、1500米无人船无线遥控器功能设计技术说明
1、无人船无线遥控器标准配置:1台发射机(手持端),1台接收机(船体端);
2、发射机布局:布局1个万向无极360度摇杆;10个数字按键,即为0 、1 、2 、3、、、9,合计10个;6个设定波特率使用的按键,分别为:左翻动键、右翻动键、上翻动键、下翻动键,确定键(OK)、取消键(OFF);另布局1个“锁定/解锁”功能按键;2个备用功能按键;面板布局液晶屏一个,用于显示具体参数值等;另有遥控器系统本身的启动+急停,用于启动遥控系统及主继电器吸合通电,和紧急情况下切断遥控系统及主继电器断开继而对应控制被控端设备总电源断电。
3、接收机端输出方式:RS485输出,与被控端PLC采用Moudbus协议通信,定义细节可双方商定;急停对应的输出控制回路,用于连接被控端设备总电源控制回路,建议采用物理触点输出即为1个无源干接点常开点继电器输出模式;
可选1):所有开关量+模拟量输出,亦可据需定制为全部物理触点控制方式,开关量输出控制,均采用常开点继电器输出,无源干接点,触点容量250V/10A,直流30V/5A。模拟量输出控制范围,可据需定制,如0-10V、0-5V、0-5-10V、10V-0- +10V、6-12-18V、4-20mA、0-2000mA、0-800,mA等;
可选2):接收器端亦可设计为RS232、CAN总线等接口输出,通过数字量信号交互达成后端设备的开关量、模拟量控制!针对急停信号亦可通过数据接口输出定值自锁保持式数字量信号达成急停输出控制目的。
4、1500米无人船无线遥控器功能执行:
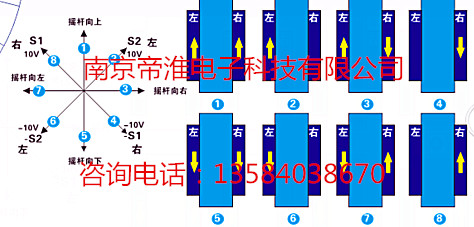
1)模拟量摇杆采用360度旋转万向无极式操纵杆(自复位方式),即为手松开则回到中间零位,此时无人船运行停止),针对左驱和右驱模拟量比例式控制,摇杆Y轴向前推动时,首先启动左右两驱正向开关量控制回路同时吸合通电即为2路开关量控制(前后推动时设定垂直角度7.5度角作为启动0点),后推同理;
当摇杆进一步Y轴正向推动时则执行左右两驱控制器比例输出的同步增大,此时无人船行进速度逐步加快,后推同理;
为便于Y轴和X轴正负方向完全直线行走,设定在Y轴和X轴正负5度角以内均视为直线推动之目的,避免人为推动时不能完全百分百直线推动状况。
因人为推动时未必能够完全保证直线推动,故设定此左右偏离角度均视为直线推动之目的。本摇杆为霍尔式(磁感应式),无实际硬件触点接触,理论寿命无限次,实际使用寿命数千万次级。
摇杆在0点位置直接右上角推动则直接就地右转,左上角45度推动则为直接就地左转;如果摇杆Y周正向推动时,向右偏离超过5度角以后,则执行向前运行同时向右转弯,其他方向同理;
摇杆向X轴负向推动,则对应右电机正向继电器吸合接通,同时左电机反向继电器吸合接通,且针对两个电机控制器输出模拟量输出变化。此时无人船执行就地反转(就地逆时针旋转),摇杆向X轴正向推动,则反之!
如上开关量控制均对应接收器端定值数字量信号输出,模拟量控制均对应接收器端连续变化的数字量信号输出,摇杆前后推动即为Y轴达成256段分级比例输出,左右推动X轴同理分级为256段;
当行走不同时,通过同步微调进行调整;
摇杆与左右驱动运行输出结构设计图见附件一.
2)十个数字键,对应接收器端10个数字量信号输出,均为点动式设计,相互之间不设定互锁逻辑,由被控端PLC自定义处理;
3)波特率功能设置:对应此功能设计6个功能按键,分别为:左翻动键、右翻动键、上翻动键、下翻动键,确定键(OK)、取消键(OFF),翻动按键目的即为翻动数字位,进而进行设置,翻动到所需数值位时,通过确定键进行确定设置,如果选错了,则可以通过取消键取消设置,进而重新进行新的设置模式;
4)备用功能按键2个,均设计为点动式控制,不设定互锁逻辑,便于后端自定义处理;
5)“锁定/解锁”功能按钮,即可作为结合急停蘑菇头按钮两者同时按下时的功能设定,及收发器之间的对码匹配成对。亦可作为防止误碰误动作或不小心跌落地面时导致不必要的按钮功能启动等意外事情的发生,进一步确保运行操作过程中的安全度!“锁定/解锁”功能只针对自复位模式操作杆或自复位扭子开关或点动式按键而言,自锁保持模式按钮不受此限制。
6)遥控器本身液晶屏内容显示:常规情况下用于显示电池电量、信号强度,液晶屏自带背光,即使强光下亦可清晰判别所显示的内容,一路了然。定制显示当前动作执行状态,以便于夜间控制或光线不好的情况下控制时,清晰提醒当前工作状态等,显示例如前进、后退、停止等,均可通过液晶屏以文字说明或特定符号进行显示,比如可以显示为“正在前进”、“正在后退”、“已经停止”,显示方式可以为数字、符号、文字、混合式显示等;本次定制,主要用于波特率显示,及设置时的翻动展示、数字变化的调整显示。
7)启动+急停,启动按下后,则发射机开始供电,且此时对应接收机端的主继电器吸合通电,被控端总电源接通;当急停旋钮按下时,则发射机关机,此时对应的接收机端的所有输出回路断开,被控端总电源切断,确保设备紧急停止。
5、无人船无线遥控器发射器端电池电量及信号指示显示:电量不足时可以在液晶屏上以特定符号或类似指示红灯方式提示更换电池,正常执行信号时可以设计为符号或类似于绿灯闪烁提示,。
6、无人船无线遥控器系统抗干扰性能处理:采用自动跳频技术,遭遇同频干扰时,可自动搜索空闲频道并自动跳频至空闲频道,收发两端同步跳动,不在固定频点工作,跳动时差毫秒级,避免了现场各类干扰源及同频干扰之可能。
7、收发器对码匹配:为便于配置或更换或启用应急备用发射机或接收机,设置对码使用方式,采用发射机中的两个按键或三个按键或四个按键同时按下一定时间达成对码匹配应用。
8、无人船无线遥控器系统每套地址编码唯一:每套遥控器遥控器发射机和接收机之间有唯一信号加密编码,确保多套同环境使用无干扰,且发射机接收机使用同一个无线频点,确保唯一针对性发射接收信号。
9、发射机端采用可充电锂电池供电,持续供电耗能设计按照最少持续工时长大于10小时处理;接收机端供电可选:DC12V、DC24V、DC48V、AC36V、AC220V、AC380V,订货前说明。
10、保险丝,5A或10A容量值,用于过流保护接收机不被烧坏;
二、1500米无人船无线遥控器发射器接收器技术参数
发射器
频率范围:433MHz
遥控距离:1500m
密码保护:40亿组
天线形式:内藏式
防护等级:IP65
使用电源: 8400mA镍氢电池
环境温度:-25℃~+75℃
接收器
频率范围:433MHz
接收灵敏度:-100dBm
密码保护:40亿组
天线形式:外置式
安装方式:内置导轨式固定
使用电源:DC12V或24V可定制
环境温度:-25℃~+75℃
非标工业遥控器研发定制厂商南京帝淮电子科技讲解
一、1500米无人船无线遥控器功能设计技术说明
1、无人船无线遥控器标准配置:1台发射机(手持端),1台接收机(船体端);
2、发射机布局:布局1个万向无极360度摇杆;10个数字按键,即为0 、1 、2 、3、、、9,合计10个;6个设定波特率使用的按键,分别为:左翻动键、右翻动键、上翻动键、下翻动键,确定键(OK)、取消键(OFF);另布局1个“锁定/解锁”功能按键;2个备用功能按键;面板布局液晶屏一个,用于显示具体参数值等;另有遥控器系统本身的启动+急停,用于启动遥控系统及主继电器吸合通电,和紧急情况下切断遥控系统及主继电器断开继而对应控制被控端设备总电源断电。
3、接收机端输出方式:RS485输出,与被控端PLC采用Moudbus协议通信,定义细节可双方商定;急停对应的输出控制回路,用于连接被控端设备总电源控制回路,建议采用物理触点输出即为1个无源干接点常开点继电器输出模式;
可选1):所有开关量+模拟量输出,亦可据需定制为全部物理触点控制方式,开关量输出控制,均采用常开点继电器输出,无源干接点,触点容量250V/10A,直流30V/5A。模拟量输出控制范围,可据需定制,如0-10V、0-5V、0-5-10V、10V-0- +10V、6-12-18V、4-20mA、0-2000mA、0-800,mA等;
可选2):接收器端亦可设计为RS232、CAN总线等接口输出,通过数字量信号交互达成后端设备的开关量、模拟量控制!针对急停信号亦可通过数据接口输出定值自锁保持式数字量信号达成急停输出控制目的。
4、1500米无人船无线遥控器功能执行:
1)模拟量摇杆采用360度旋转万向无极式操纵杆(自复位方式),即为手松开则回到中间零位,此时无人船运行停止),针对左驱和右驱模拟量比例式控制,摇杆Y轴向前推动时,首先启动左右两驱正向开关量控制回路同时吸合通电即为2路开关量控制(前后推动时设定垂直角度7.5度角作为启动0点),后推同理;
当摇杆进一步Y轴正向推动时则执行左右两驱控制器比例输出的同步增大,此时无人船行进速度逐步加快,后推同理;
为便于Y轴和X轴正负方向完全直线行走,设定在Y轴和X轴正负5度角以内均视为直线推动之目的,避免人为推动时不能完全百分百直线推动状况。
因人为推动时未必能够完全保证直线推动,故设定此左右偏离角度均视为直线推动之目的。本摇杆为霍尔式(磁感应式),无实际硬件触点接触,理论寿命无限次,实际使用寿命数千万次级。
摇杆在0点位置直接右上角推动则直接就地右转,左上角45度推动则为直接就地左转;如果摇杆Y周正向推动时,向右偏离超过5度角以后,则执行向前运行同时向右转弯,其他方向同理;
摇杆向X轴负向推动,则对应右电机正向继电器吸合接通,同时左电机反向继电器吸合接通,且针对两个电机控制器输出模拟量输出变化。此时无人船执行就地反转(就地逆时针旋转),摇杆向X轴正向推动,则反之!
如上开关量控制均对应接收器端定值数字量信号输出,模拟量控制均对应接收器端连续变化的数字量信号输出,摇杆前后推动即为Y轴达成256段分级比例输出,左右推动X轴同理分级为256段;
当行走不同时,通过同步微调进行调整;
摇杆与左右驱动运行输出结构设计图见附件一.
2)十个数字键,对应接收器端10个数字量信号输出,均为点动式设计,相互之间不设定互锁逻辑,由被控端PLC自定义处理;
3)波特率功能设置:对应此功能设计6个功能按键,分别为:左翻动键、右翻动键、上翻动键、下翻动键,确定键(OK)、取消键(OFF),翻动按键目的即为翻动数字位,进而进行设置,翻动到所需数值位时,通过确定键进行确定设置,如果选错了,则可以通过取消键取消设置,进而重新进行新的设置模式;
4)备用功能按键2个,均设计为点动式控制,不设定互锁逻辑,便于后端自定义处理;
5)“锁定/解锁”功能按钮,即可作为结合急停蘑菇头按钮两者同时按下时的功能设定,及收发器之间的对码匹配成对。亦可作为防止误碰误动作或不小心跌落地面时导致不必要的按钮功能启动等意外事情的发生,进一步确保运行操作过程中的安全度!“锁定/解锁”功能只针对自复位模式操作杆或自复位扭子开关或点动式按键而言,自锁保持模式按钮不受此限制。
6)遥控器本身液晶屏内容显示:常规情况下用于显示电池电量、信号强度,液晶屏自带背光,即使强光下亦可清晰判别所显示的内容,一路了然。定制显示当前动作执行状态,以便于夜间控制或光线不好的情况下控制时,清晰提醒当前工作状态等,显示例如前进、后退、停止等,均可通过液晶屏以文字说明或特定符号进行显示,比如可以显示为“正在前进”、“正在后退”、“已经停止”,显示方式可以为数字、符号、文字、混合式显示等;本次定制,主要用于波特率显示,及设置时的翻动展示、数字变化的调整显示。
7)启动+急停,启动按下后,则发射机开始供电,且此时对应接收机端的主继电器吸合通电,被控端总电源接通;当急停旋钮按下时,则发射机关机,此时对应的接收机端的所有输出回路断开,被控端总电源切断,确保设备紧急停止。
5、无人船无线遥控器发射器端电池电量及信号指示显示:电量不足时可以在液晶屏上以特定符号或类似指示红灯方式提示更换电池,正常执行信号时可以设计为符号或类似于绿灯闪烁提示,。
6、无人船无线遥控器系统抗干扰性能处理:采用自动跳频技术,遭遇同频干扰时,可自动搜索空闲频道并自动跳频至空闲频道,收发两端同步跳动,不在固定频点工作,跳动时差毫秒级,避免了现场各类干扰源及同频干扰之可能。
7、收发器对码匹配:为便于配置或更换或启用应急备用发射机或接收机,设置对码使用方式,采用发射机中的两个按键或三个按键或四个按键同时按下一定时间达成对码匹配应用。
8、无人船无线遥控器系统每套地址编码唯一:每套遥控器遥控器发射机和接收机之间有唯一信号加密编码,确保多套同环境使用无干扰,且发射机接收机使用同一个无线频点,确保唯一针对性发射接收信号。
9、发射机端采用可充电锂电池供电,持续供电耗能设计按照最少持续工时长大于10小时处理;接收机端供电可选:DC12V、DC24V、DC48V、AC36V、AC220V、AC380V,订货前说明。
10、保险丝,5A或10A容量值,用于过流保护接收机不被烧坏;
二、1500米无人船无线遥控器发射器接收器技术参数
发射器
频率范围:433MHz
遥控距离:1500m
密码保护:40亿组
天线形式:内藏式
防护等级:IP65
使用电源: 8400mA镍氢电池
环境温度:-25℃~+75℃
接收器
频率范围:433MHz
接收灵敏度:-100dBm
密码保护:40亿组
天线形式:外置式
安装方式:内置导轨式固定
使用电源:DC12V或24V可定制
环境温度:-25℃~+75℃
